Scientists Construct Exoskeleton for Cell-Sized Robots
Imagine putting the computational power of the spaceship Voyager onto an object the size of a cell. Where would you explore?
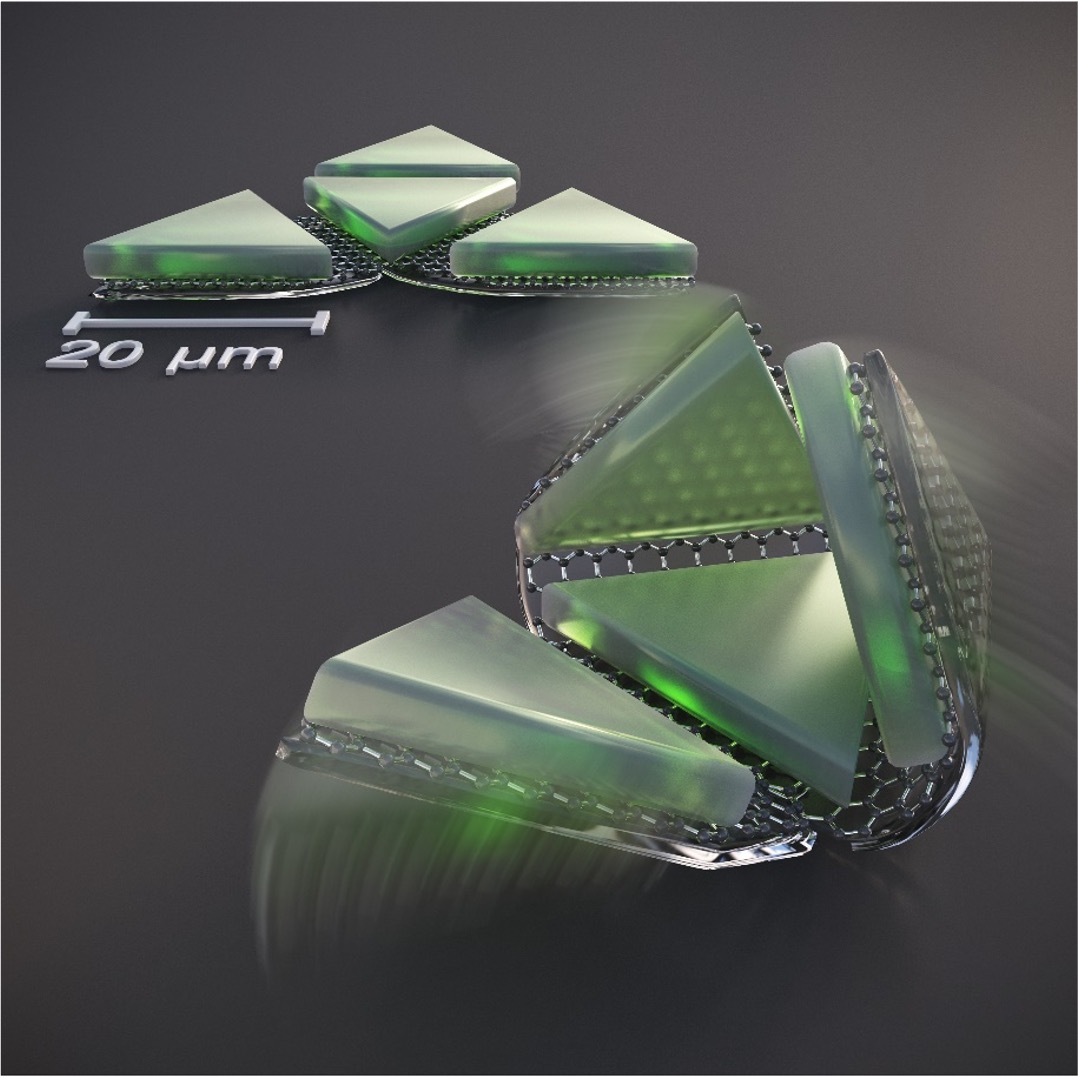
Researchers created a robot “exoskeleton” that can rapidly change its shape by sensing shifts in its environment. These microscale machines—equipped with electronic, photonic, and chemical payloads—could become a powerful platform for robotics at the size scale of biological microorganisms. The machines move using a motor called a bimorph, which is an assembly of two materials—in this case, graphene and glass—that bends when driven by a stimulus like heat, a chemical reaction, or an applied voltage. The shape change happens because, in the case of heat, two materials with different thermal responses expand by different amounts over the same temperature change. As a consequence, the bimorph bends to relieve some of this strain, allowing one layer to stretch out longer than the other. By adding rigid flat panels that cannot be bent by bimorphs, the bending is localized to take place along creases, creating folds. This concept enabled them to make a variety of atomic origami structures ranging from tetrahedra to cubes.